本文为节选内容
如需更多报告,联系客服
或扫码获取报告

从特斯拉Optimus出发,看减速器方案需求
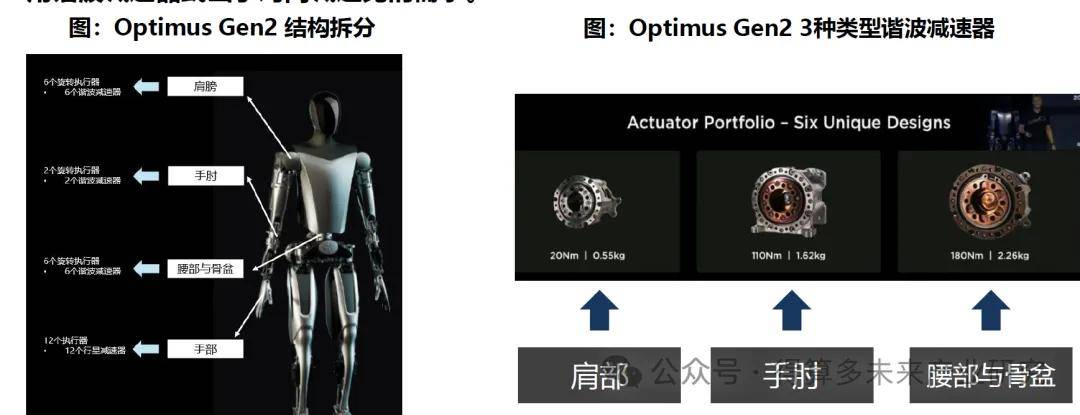
◼ 特斯拉Optimus Gen2需要12个行星减速器和14个谐波减速器。其中,谐波减速器用于肩膀、手肘、腰部与骨盆的旋转关节处;行星减速器用于手部传动装置内,单手用量6个。
◼ 从减速器特性看,行星减速器和谐波减速器各有千秋:1)行星减速器的高承载能力及强抗冲击能力的特性适配灵巧手应用场景,但精度有限,一定程度上无法满足高精度灵巧手需求;2)谐波减速器的免维护特性和高减速比适配肩膀、手肘、腰部与骨盆等大关节部位,但成本高昂,与降本趋势不匹配。
◼ 我们认为,特斯拉手部采用行星减速器或出于降本需求,在肩膀、手肘、腰部与骨盆部位采用谐波减速器或出于对高减速比的需求。
◼ 除特斯拉外,其余大部分具身主机厂亦采用谐波+行星的复合方案:1)智元远征A2搭载谐波一体关节+自研的关节电机PowerFlow(内置高力矩透明度行星减速器);2)宇树G1搭载带双编码器的行星减速器关节模组;3)傅利叶GR-1在上半身采用谐波减速器、下半身髋关节则采用行星减速器;4)优必选则搭载谐波+行星减速器一体化关节。
◼ 从减速器各自特点看,以行星为主的减速器方案在成本端优势显著,如宇树G1售价仅为9.9万元;谐波减速器能在扭矩方面提供更好的加持,故而下游采取行星+谐波复合方案的机型的输出扭矩普遍更高。

◼ 哈默纳科将手部行星减速器替换为微型谐波减速器。哈默纳科的迷你执行器RSF-3C及RSF-5B集成谐波减速器、无刷伺服电机及编码器于一体,每根手指配备2-3个;东京大学提供的采用RFS-3B和RFS-5A两种类型的谐波减速器灵巧手方案中,手指根部直径仅为20mm,接近人手。此方案的成本虽更高,但高扭矩也使得灵巧手的性能得到大幅提升。
◼ RV减速器广泛应用于工业机器人如关节型、搬运、焊接、AGV机器人中,主要由于其扭矩大于行星和谐波减速器,更适配工业场景。同时,高精度、大扭矩的特性也有望打开人形机器人中腕部、腰部等应用场景。
◼ 当人形机器人满足整机可正常工作的前提下,性能提升是进一步发展方向。从降本/性能两个大维度看,行星/RV分别是最优选择,但RV受限于体积,一般在工业机器人和人形大关节部位应用较多,谐波减速器虽然成本高昂,但体积和性能较行星均有提升。综合来看,行星和谐波拥有成为过去乃至当下的主流选择的基本盘。
◼ 摆线针轮新型减速器性能增量高于成本&体积增量,或为行星+谐波的进一步优化方案。摆线针轮减速器齿轮啮合的构造使得其较行星精度更高、较谐波同体积扭矩输出能力更强、较传统RV体积重量更小;但价格、体积/重量较谐波和行星略高。
◼ 综合来看,摆线针轮在大幅度提升人形机器人关节扭矩的情况下,成本和体积/重量增幅可保持在可控范围内,且当前采用PEEK等轻量化材料打造的摆线针轮减速器可大幅降低自重。我们认为,摆线针轮有望在人形肩部、腰部、下肢髋关节等大关节部位实现应用。
